
列表
51单片机串口通信实验电路详解
发表时间: 2024-02-24 作者: 乐球直播在线51单片机是对所有兼容Intel8031指令系统的单片机的统称。该系列单片机的始祖是Intel的8004单片机,后来随着Flashrom技术的发展,8004单片机取得了长足的进展,成为应用最广泛的8位单片机之一,其代表型号是ATMEL公司的AT89系列,它大范围的应用于工业测控系统之中。
很多公司都有51系列的兼容机型推出,今后很长的一段时间内将占有大量市场。51单片机是基础入门的一个单片机,还是应用最广泛的一种。必须要格外注意的是51系列的单片机一般不具备自编程能力。
单片机的串口通信看起来是很复杂的,还在于他用到了更多的寄存器,与前面的知识相比他更具综合能力,写起来考虑的问题自然也变多了。而前面学习过的定时器与中断将是单片机通信的基础。

最小系统部分(时钟电路、复位电路等)第一讲已经讲过,在此不再叙述。我们重点来了解下与计算机通信的RS-232接口电路。能够正常的看到,在电路图中,有TXD 和RXD 两个接收和发送指示状态灯,此外用了一个叫MAX3232 的芯片,那它是用来实现什么的呢?
首先我们要知道计算机上的串口是具有RS-232 标准的串行接口,而RS-232 的标准中定义了其电气特性:高电平“1”信号电压的范围为-15V~-3V,低电平“0”
信号电压的范围为+3V~+15V。可能有些读者会问,它为何需要以这样的电气特性呢?这是因为高低电平用相反的电压表示,至少有6V 的压差,非常好的提高了数据传输的可靠性。由于单片机的管脚电平为TTL,单片机与RS-232 标准的串行口进行通信时,首先要解决的便是电平转换的问题。
一般来说,可以再一次进行选择一些专业的集成电路芯片,如图中的MAX3232。MAX3232 芯片内部集成了电压倍增电路,单电源供电就可以完成电平转换,而且工作电压宽,3V~5.5V 间均能正常工作。其典型应用如图中所示,其外围所接的电容对传输速率有影响,在试验套件中采用的是0.1μF。
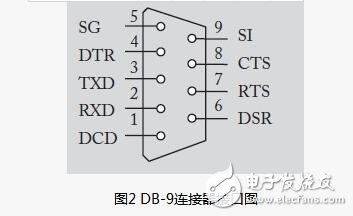
值得一提的是MAX3232 芯片拥有两对电平转换线路,图中只用了一路,因此浪费了另一路,在一些场合可以将两路并联以获得较强的驱动抗干扰的能力。此外,我们有必要了解图中与计算机相连的DB-9 型RS-232的引脚结构(见图2)。

静态: span style= font-family:Microsoft YaHei;font-size:18px; #include reg52.h sbit dula=P2^6; //数码管寄存器 sbit wela=P2^7; //位寄存器 void main() { wela=1; P0=0xf8; wela=0; //确定几位数码管亮,且使其状态保持 dula=1; P0=0x3f; //显示的数字 dula=0; while(1); //保持常亮 } /span 动态: span style= font-family:Microsoft YaHei;font-si
51单片机汇编延时程序算法详解 将以12MHZ晶振为例,详细讲解MCS-51单片机中汇编程序延时的精确算法。 指令周期、机器周期与时钟周期 指令周期: CPU执行一条指令所需要的时间称为指令周期,它是以机器周期为单位的,指令不同,所需的机器周期也不同。 时钟周期: 也称为振荡周期,一个时钟周期 =晶振的倒数。 MCS-51单片机的一个机器周期=6个状态周期=12个时钟周期。 MCS-51单片机的指令有单字节、双字节和三字节的,它们的指令周期不完全一样,一个单周期指令包含一个机器周期,即12个时钟周期,所以一条单周期指令被执行所占时间为12*(1/12000000)=1μs 程序分析 例1 50ms 延时子程序: D
51 单片机 与上位机串口通信程序设计 1. 发送:向总线. 接收:从总线接收命令,并分析是地址还是数据。 3. 定时发送:从内存中取数并向主机发送. 经过调试,以上功能基本实现,目前能够最终靠上位机对 单片机 进行实时控制。 程序如下: //这是一个 单片机 C51串口接收(中断)和发送例程,可拿来测试51单片机的中断接收 //和查询发送,另外我觉得发送没有必要用中断,因为程序的开销是一样的 #include reg51.h #include stdio.h #include string.h #define INBUF_LEN 4 //数据长度 unsigned ch
利用程序实践数据传送类指令 单片机的累加器A与片外RAM之间的数据传递类指令 MOVX A,@Ri MOVX @Ri,A MOVX A,@DPTR MOVX @DPTR,A 说明: 1)在51系列单片机中,与外部存储器RAM打交道的只能是A累加器。所有需要传送入外部RAM的数据必需要通过A送去,而所有要读入的外部RAM中的数据也必需通过A读入。在此我们能看出内外部RAM的区别了,内部RAM间能直接进行数据的传递,而外部则不行,比如,要将外部RAM中某一单元(设为0100H单元的数据)送入另一个单元(设为0200H单元),也必须先将0100H单元中的内容读入A,然后再传送到0200H单元中去。 要读或写外部的RAM,当
8051单片机指令定义详解 (ADD A, src-byte ) ADD A, src-byte 功能:加法。 说明:ADD指令可用于完成把src-byte所示的源操作数和累加器A的当前值相加。并将结果置于累加器A中。根据运算结果,若第7位有进位则置进位标志为1,否则清零;若第3位有进位则置辅助进位标志为1,否则清零。如果是无符号整数相加则进位置位,显示当前运算结果发生溢出。 如果第6位有进位生成而第7位没有,或第7位有进位生成而第6位没有,则置OV为1,否则OV被清零。在进位有符号整数的相加运算的时候,OV置位表示两个正整数之和为一负数,或是两个负整数之和为一正数。 本类指令的源操作数可接受4种
在机器人机电控制管理系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统很容易与之接口。 舵机是一种位置伺服的驱动器,适用于那些需要角度一直在变化并能保持的控制管理系统。其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。 图1 舵机的控制要求 舵机的控制信号是PWM信
PWM信号进行舵机控制 /
1、引言 小型会议系统或语音群聊系统是由多路音频电路组成的.为了使通话井然有序,一定要通过音频交换电路来控制各路音频信号的输出。音频交换电路大多数都用在完成语音信号的切换。以实现同频终端的话音通信。经对可靠性、经济性、兼容性和供货情况做多方面的综合考虑,该控制管理系统选用了AT89S52型单片机和交换控制矩阵器件MT8816AE。其中,AT89S52型单片机具有实用,价廉,功耗小,速度快,体积小,功能强等优点:MT8816AE是CMOS单片集成电路,具有功耗小,可靠性高等特点。 2、控制管理系统组成和电路设计 图1给出总系统组成框图。它由主控计算机、音频交换电路、终端设备等组成。其工作原理是:在主控计算机捕获终端的工作频率后。向
的音频交换控制管理系统设计 /
超声波测距传感器以其测量精度高、响应快和价格低而大范围的应用在工业现场测距、移动机器人导航和定位等场合。超声波测距传感器常用的方式是1 个发射头对应1 个接收头,也有多个发射头对应1 个接收头。 它们共同之处是:每个接收头只测量一个位置,这一个位置就是除盲区内因发射的超声波旁瓣引起的接收信号超声波包络峰值外,第1个接收信号超声波包络峰值对应的距离。 在机器人自主导航避障时,机器人只关心最近障碍物的距离,是能完成自主避障的。 但是在机器人定位时,尤其在动态环境下,1 个接收头同时测量多个距离,能够更多地描述环境信息,这对机器人用超声波定位具备极其重大意义。 1 超声波 1. 1 超声波测距原理 超声波测距原理最简单,一般是采用时差法
实现多目标超声波测距的设计 /
MPS电机研究院 让电机更听话的秘密! 第一站:电机应用知识大考!跟帖赢好礼~
电源小课堂 从12V电池及供电网络优化的角度分析电动汽车E/E架构的趋势
解锁【W5500-EVB-Pico】,探秘以太网底层,得捷电子Follow me第4期来袭!
【下载】LAT1362 利用STM32 TIMER触发ADC实现分组转换
【下载】LAT1334 基于MCSDK5.4.8电机库修改两电阻采样方法
【下载】LAT1347 基于STM32CubeIDE移植ClassB 4.0
【下载】LAT1340 STM32H5读取温度传感器校准值时进HardFault的原因分析
【生态】使用STM32CubeMX在STM32U5上配置LPBAM应用程序
【MPU】轻松使用STM32MP13x如MCU般在Cortex A 核上裸跑应用程序
【新品】STM32H5-Arm® Cortex®-M33 内核,主频高达250MHz,提升性能与信息安全性
【新品】STM32MP13X-支持Linux、RTOS和Bare Metal应用,新一代通用工业级MPU
【新品】Arm® Cortex®-M33处理器内核,运行频率160 MHz,基于Armv8-M架构并带有TrustZone®
【新品】降本增效这事儿,就看STM32C0,低至0.24美元” ,开机即可物联世界
【GUI开发】TouchGFX 4.23:支持矢量字体,节省Flash,更丰富的UI!
【边缘AI】突破边缘AI应用的次元壁:首届意法半导体边缘人工智能峰会举行
【生态系统】STM32CubeProgrammer和STM32CubeIDE协同调试的方法
【无线携手创新微MinewSemi共创低功耗模块,引领中国智能连接未来

中断系统1 数据传输方式无条件传输:处理器不必了解外部设备状态,直接进行数据传输,用于指示灯和按键等简单设备 。查询方式:传输前,一 ...
如果在STM32微控制器的串口通信中,接收中断没办法触发,可能有以下几个可能的原因:1 串口接收中断未使能:在初始化串口时,可能未正确使 ...
ADC:1 STM32内部的ADC模块有三个ADC1,ADC2,ADC3,他们彼此独立,所以能进行同步采样。2ADC的输入时钟不允许超出14MHz,它是由PCLK2经分 ...
STM32是大范围的应用的MCU,涵盖Cortex-M0、M3、M4和M7内核,共有1236多个系列,包含STM32主流MCU、STM32高性能MCU、STM32超低功耗MCU、STM32无 ...
1简介SPI:Serial Peripheral Interface,是串行外设接口。SPI是由摩托罗拉于 1985 年前后开发,是一种适用于短距离、设备到设备通信的 ...

3D打印机选什么料号?YXC扬兴科技 石英振荡器YSO110TR稳定时钟之选
基于NOVATEK NT98336 结合搭载 Hailo-8 的后端智能影像分析解决方案
ADI基于ADPD188BI的烟雾探测器集成解决方案 有奖直播 5月13日上午10:00-11:30 为您揭晓!
下载有礼:2017年泰克亚太专家大讲堂第一期:大数据与云存储环境下的高速总线技术演进
最后一周:免费获取Pasternack《RF产品选型指南》2018 印刷版!
下载《基于巨磁(GMR)的Allegro IC》白皮书,赢50元京东卡
51单片机PIC单片机AVR单片机ARM单片机嵌入式系统汽车电子消费电子数据处理视频教程电子百科其他技术STM32MSP430单片机资源下载单片机习题与教程词云: