在性能、价格、应用场景等各方面都有差异。同时,STM32MP135并非局限于裸机、
下面就结合【米尔基于STM32MP135核心板及开发板】给大家讲解一下STM32MP135强悍的性能以及开发入门等相关的内容。
STM32MP135的开发板有很多,这里就以米尔的【米尔基于STM32MP135核心板及开发板】为例来给大家讲述。
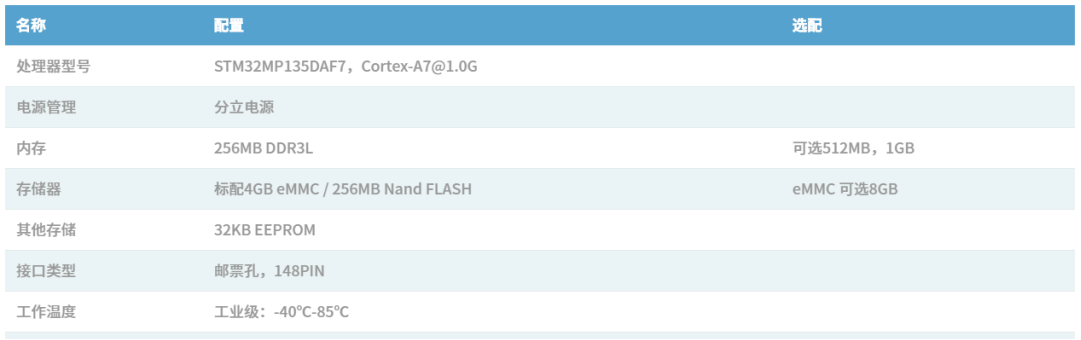
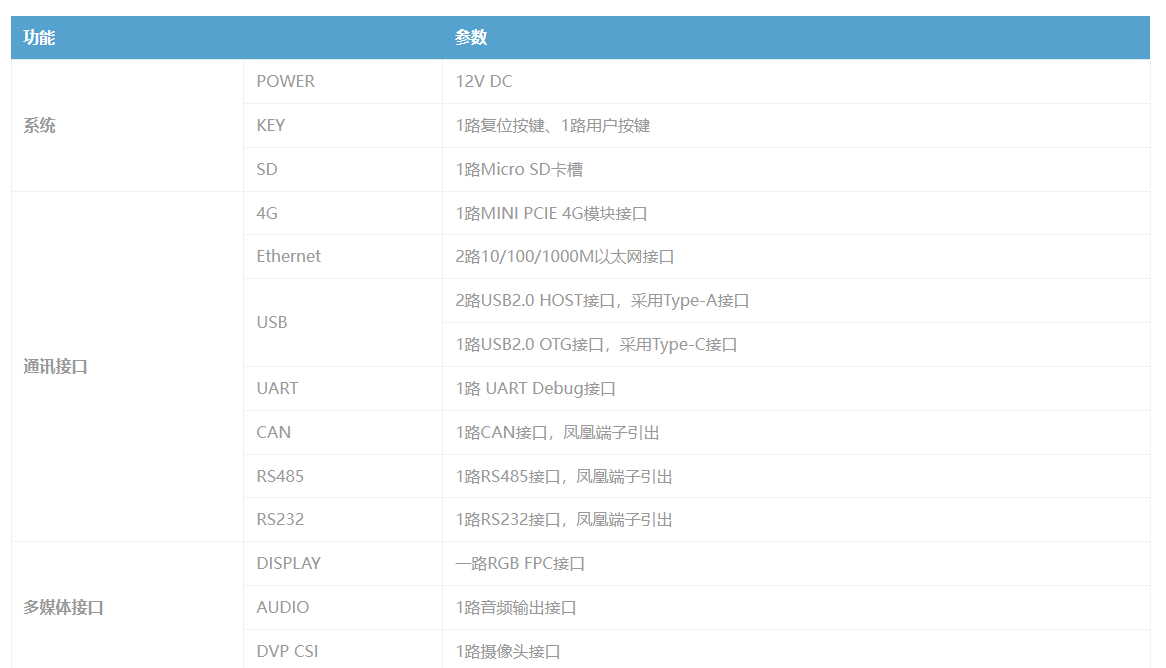
米尔基于STM32MP135底板的外设资源以及接口就比较丰富和多样了。直接给出官方的信息:
早在2019年,ST就推出了STM32MP1系列MPU,其强大的性能吸引了不少人的关注。但由于当时配套的开发资料以及生态不够完善,入手学习也难住了一大批人。
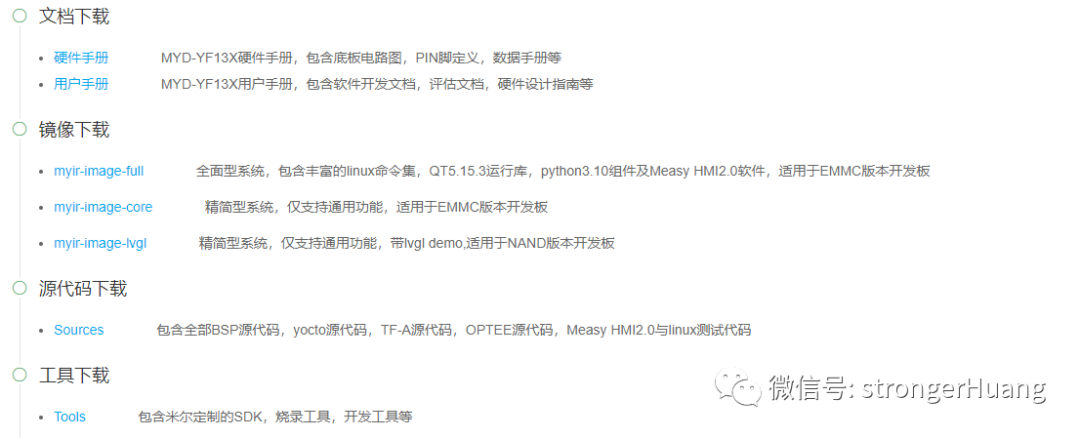
米尔设计这款米尔基于STM32MP135开发板时就考虑到了这个问题,在推出开发板的同时就推出了配套的开发资料。
在STM32MP135(MYD-YF13X)平台上跑Linux相比于普通STM32跑RTOS要复杂一点,需要具备一定的相关基础知识才行。
MYD-YF13X 搭载基于 Linux 5.15.67 版本内核的操作系统,提供了丰富的系统资源和其他软件资源。Linux 系统平台上有许多开源的系统构建框架,米尔核心板基于Yocto 构建和定制化开发。
这里我们需要使用米尔提供的envsetup.sh 脚本进行环境变量的设置
然后,构建myir-image-full 镜像。注意,选择构建不同的系统镜像,需使用不同的 bitbake 命令参数(具体命令参数可以参看提供的文档)。
这里使用ST官方的STM32CubeProg 工具进行烧写,可以在Windows平台,也可以在Linux平台。提示:烧录的时间可能有点久,需要耐心等待一会儿。
这一节应该是相对比较重要的,也是相对比较难的,包括U-boot、 kernel等相关内容的编译与更新。
以上是在独立的交叉编译环境下编译TF-A,也可以在 Yocto 项目下编译 TF-A。
更新TF-A:编译好之后,将 TF-A 镜像烧录进 Micro SD 卡,然后使用 dd 命令将镜像烧录到 SD 卡指定分区:
在独立的交叉编译环境下编译u-boot,和上面编译 TF-A 类似,也是和常规的编译u-boot 方法类似。
这一节就是芯片底层相关的适配(驱动),包括创建设备树、利用STM32CubeMX 配置GPIO、外设时钟等,以及配置自己用到的管脚。
如果你想从STM32单片机裸机、RTOS进阶到Linux,这款STM32MP135【MYC-YF13X开发板】是一个不错的选择。同时,也会用到一些熟悉的生态工具。
强悍的性能介绍 /
有奖免费试用套餐~ /
新一代通用工业级MPU,单核Cortex-A7@1.0GHz,具有极高的性价比; 支持2个千兆以太网接口
采用传统单片机产品并不能满足充电桩的智能控制等需求,本文将详细介绍基于
,助力充电桩发展 /
评测 /
采用传统单片机产品并不能满足充电桩的智能控制等需求,本文将详细介绍基于
如何助力充电桩发展 /
米尔J1028X新品 基于NXP LS1028A处理器 双核CortexA72支持6个千兆网口
艾为第3代高灵敏度可编程电容触控芯片AW933xx系列,实现可靠人体接近检测和精准触摸手势识别
LPWAN 集中器模块 RAK22#集中器 #网关 #聚焦RAK #WisLink #LoRa #LPWAN
收藏了几个电池充电电路#电子技术 #电子爱好者 #电子制作 #工作原理大揭秘
